
|
SoundStepper - Controlador de telescµpio em tempo real para Windows |
|
||||
| This page in english |
|
|||
VisÐo geral
SoundStepper Õ um controlador de telescµpio com motor de passo, 100% software, para Windows.
Usando o hardware de som para fazer o controle em tempo real dos motores, ele requer apenas um simples amplificador de corrente externo para funcionar.
A maioria dos sistemas deste tipo Õ escrito em alguma linguagem para MS-DOS, porque o Windows Õ muito precÃrio em se tratando de controle em tempo real. Isso significa utilizar a CPU em modo dedicado, e perder todas as possibilidades de se utilizar o computador para outra finalidade simultaneamente com o controle, como por exemplo utilizar um mapa celeste, autoguiagem, ou capturar imagens em uma webcam ou CCD.
Neste sistema, para Windows, o consumo de CPU Õ mÚnimo, e pode-se utilizar quase todo o processamento do computador para estas outras atividades, sem prejuÚzo do controle. O truque Õ se utilizar do hardware de som do computador, que possui buffers de dados e processamento prµprio, para o controle dos motores de passo em "tempo real". O que o SoundStepper faz Õ gerar uma sequõncia de dados e enviar ao sistema de som, que por sua vez se encarrega de reproduzir como se fosse uma mºsica, em velocidade constante, sem trancos nem falhas, e sem necessitar da CPU em tempo real.
Projeto de cµdigo aberto e de domÚnio pºblico.
Inicialmente idealizado, iniciado, desenvolvido e utilizado pelo programador e astr¶nomo amador brasileiro Maciel B. Sparrenberger
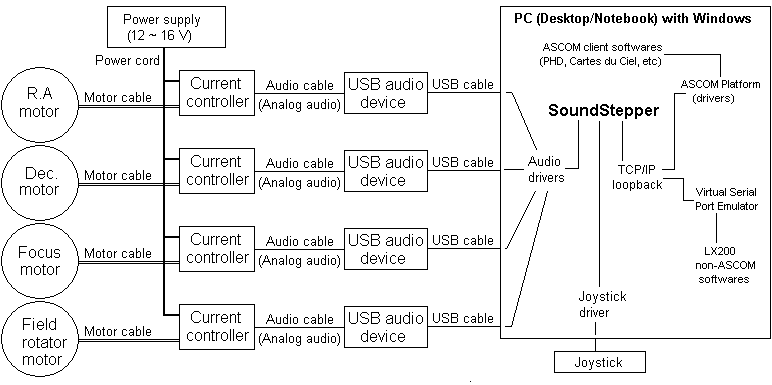
Diagramas de blocos do sistema completo:
a) Usando controladores de corrente analµgicos:
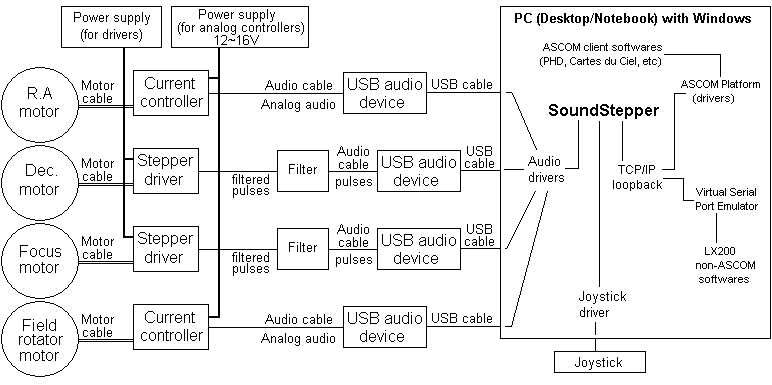
b) Usando drivers comerciais "pulso/direÓÐo" (sugestÐo de filtro aqui):

c) Misturando arbitrariamente controladores analµgicos e drivers "pulso/direÓÐo":
CARACTERëSTICAS
Perguntas mais frequentes
Eu preciso compilar o SoundStepper?
R: NÐo, o executÃvel està incluso em todos os pacotes de distribuiÓÐo.
O SoundStepper consegue controlar montagens altazimutais?
R: Sim, a partir da versÐo 5.0 beta.
HÃ rotina de alinhamento e correÓÐo de erros para montagens altazimutais?
R: NÐo hà compensaÓÐo de erros de alinhamento, a montagem precisa ter os eixos perfeitamente ortogonais e estar precisamente nivelada. Esta correÓÐo de erros està nos planos, mas para futuras vers¾es.
Posso utilizar o SoundStepper para outra aplicaÓÐo que nÐo seja controle de telescµpios?
R: Modificando o cµdigo-fonte, sim. O SoundStepper faz o mesmo que os controladores de micropasso, mas com a parte eletr¶nica simplificada.
Que tipo de dispositivo de Ãudio pode ser utilizado?
R: Qualquer dispositivo que consiga manipular sinais de tensÐo contÚnua, ou seja, sem capacitores na saÚda.
Que tipo de motor pode ser usado?
R: Motor de passo bipolar, ou unipolar ligado como bipolar. A tensÐo depende apenas do amplificador. Como o circuito sugerido trabalha com 12V, Õ recomendado que a tensÐo nominal do motor seja menor que 8V. Com drivers comerciais "pulso/direÓÐo", pode ser usado qualquer tipo de motor compatÚvel com o driver, inclusive motores de 3 ou 5 fases.
Tenho outra dºvida, onde encontro uma resposta?
R: Veja a seÓÐo "Contato" abaixo.
Cµdigo-fonte e desenvolvimento
O cµdigo foi desenvolvido e compilado em Delphi (Delphi7 Second Edition, 7.2), com o pacote INDY sockets versÐo 9 (VCL) instalado (http://www.indyproject.org).
Os arquivos de configuraÓÐo do projeto foram incluÚdos com o fonte, de forma que basta abrir o SoundStepper.dpr no Delphi, e serà possÚvel compilar tal como foi realizado para a disponibilizaÓÐo dos pacotes para download.
O delphi foi escolhido porque ele oferece µtimo desempenho e alternativas simples para:
NÐo hà necessidade de interfacear com portas seriais, paralelas ou USB. As interfaces sÐo as listadas acima: Ãudio, teclado, mouse, TCP/IP, alÕm de arquivos (texto e binÃrios).
O SoundStepper Õ baseado em threads e message loops. Foi feito assim para que as aÓ¾es do usuÃrio nÐo causassem bloqueio das funÓ¾es "vitais", que nÐo podem parar, e tambÕm para que uma nÐo interferisse na outra.
Embora jà tenha sido relatado que o SoundStepper funciona no Linux (usando o Wine), ao meu ver o maior desafio de portabilidade sÐo as messages do Windows, que nÐo tem suporte em outro sistema operacional.
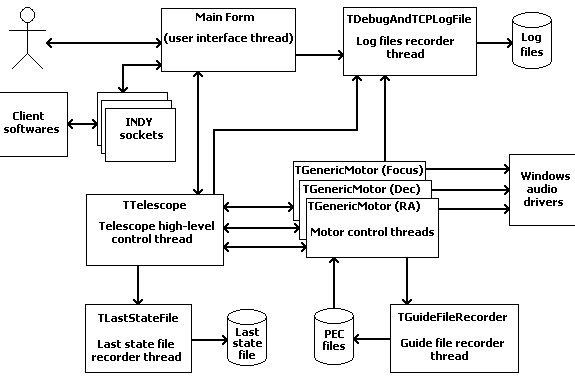
Diagrama de blocos do software SoundStepper e suas threads:
Histµrico
V.0 (Out/2006):
O embriÐo do sistema era escrito em C para MS-DOS, exigia o computador dedicado, e controlava o motor de RA atravÕs de micropasso pela porta paralela, mas jà tinha o PEC/NPEC feito de forma rudimentar, com controles apenas manuais, salvando o resultado do treinamento em arquivos, bem como o fim-de-curso e o retorno automÃtico Á posiÓÐo inicial.
V.1.0 (Mar/2007):
Feito o sistema de controle do motor de RA atravÕs da saÚda de som, para Windows (escrito em Delphi), porÕm com o mesmo sistema rudimentar de controle manual de PEC/NPEC, que exigia a marcaÓÐo de pontos de referõncia.
Alguns controles de enquadramento (muito lentos) foram adicionados, bem como pausa e ajuda.
NÐo havia guiagem, a tela era poluÚda e os controles pouco intuitivos, alÕm do sistema Ás vezes apresentar falhas no som, gerando trancos.
V.1.1 (Jun/2007 - nÐo distribuÚda):
Acrescentado um sistema rudimentar de guiagem em RA pela porta paralela, e o arquivo de configuraÓÐo (SoundStepper.ini)
V.1.2 (Mai/2009 - nÐo distribuÚda):
Acrescentada a guiagem em declinaÓÐo, tambÕm de forma rudimentar apenas pela porta paralela.
A programaÓÐo estava virando uma bagunÓa, pois nÐo era orientada a objetos: Ou o sistema seria refeito todo, ou nÐo poderia mais ser mexido.
V.2.0 (Jun/2009 - nÐo distribuÚda):
Modificada e descomplicada toda a interface, jà semelhante Á 3.0, com controles muito mais intuitivos.
Implementados controles de guiagem manual, aplicaÓÐo mais extensiva do arquivo de configuraÓÐo, e modificada a sistemÃtica de gravaÓÐo dos pontos de guiagem, de float para int.
A programaÓÐo foi quase toda refeita, tentando utilizar os preceitos da ProgramaÓÐo Orientada a Objetos.
Melhorado o procedimento de start/stop do motor de RA.
No entanto o sistema continuava apresentando falhas no som ao minimizar/maximizar e nÐo dispunha de recursos de movimento rÃpido para enquadramento.
V.3.0 (Jul/2009 - nÐo distribuÚda):
VersÐo multi-thread, com uma thread exclusiva para o controlador e outra para a tela.
NÐo apresenta mais falhas no som ao minimizar/maximizar.
Interface idõntica Á versÐo 2.0.
V.3.1 (Ago/2009):
Acrescentados controles de movimento rÃpido para enquadramento (Control Box), jà incluindo controle de tempo na geraÓÐo dos passos do motor de DeclinaÓÐo, para compensar as falhas de tempo real do Windows.
AceleraÓÐo suave e controlada na aceleraÓÐo e desaceleraÓÐo de ambos os motores.
Melhorada a intuitividade da forma de atuaÓÐo dos controles, e a interrupÓÐo do retorno passou a ser permitida.
Re-elaborada esta documentaÓÐo.
V.4.0 (Set/2010):
Modificada a lµgica de controle para utilizar dispositivos de Ãudio USB que suportam operaÓÐo em tensÐo contÚnua, garantindo melhor controle dos motores e aposentando o uso da interface de Ãudio padrÐo do computador, que fica livre para o uso normal do Ãudio.
Escopo ampliado para 3 motores (RA, Dec e focalizador).
Acrescentada capacidade de controlar qualquer tipo de montagem equatorial, bem como os controles de "sync", "go-to" e "flip".
Tela de configuraÓÐo grÃfica, contendo alÕm dos parãmetros de operaÓÐo do Ãudio, as especificaÓ¾es e limites da montagem.
Monitoramento e compensaÓÐo automÃtica da variaÓÐo da frequõncia de amostragem, para tornar o acompanhamento imune Ás variaÓ¾es que podem ocorrer no hardware de som.
A forma de onda passou a ser configurÃvel (controle de linearidade do motor), diminuindo o bamboleio no caso de montagens de baixa reduÓÐo.
Desmembramento dos textos apresentados do cµdigo, permitindo armazenar os textos em arquivos-texto .ini, e a fÃcil traduÓÐo para qualquer idioma ocidental.
Realizada a primeira traduÓÐo para o inglõs. O cµdigo tambÕm foi modificado para os nomes-de-variÃveis e comentÃrios serem em inglõs.
Projeto foi disponibilizado como "domÚnio pºblico" no Sourceforge.net.
ImplementaÓÐo do protocolo LX200, permitindo o uso de driver ASCOM para controle e guiagem, aposentando assim a porta paralela.
Autosalvamento e autorrecuperaÓÐo da ºltima posiÓÐo do telescµpio, mesmo em caso de crash.
Reelaborada esta documentaÓÐo (migrade de arquivo LEIA-ME.TXT para HTML).
V.5.0 (Fev/2011):
Capacidade de controlar montagens altazimutais.
Modificada a interface de teclado para permitir controle mais amplo, fÃcil e preciso.
Acrescentado o controle de "sync" altazimutal.
Refeitos os algoritmos de controle dos motores pela thread principal.
Nova interface de configuraÓÐo e testes
Acrescentada a interface por joystick
V.5.1 (Mai/2012):
Adicionada a opÓÐo de controle por "pulso/direÓÐo", compatÚvel com drivers comerciais.
Nova tela de entrada, apresentando o status anterior e todas as opÓ¾es disponÚveis.
DetecÓÐo de threads mortas.
InserÓÐo de buffers extras em altas velocidades, diminuindo a possibilidade de falhas catastrµficas.
Compatibilidade com Stellarium (os formatos de ãngulo LX200 foram mudados do "dialeto documentado" para o "dialeto real").
Muitos bugs corrigidos.
V.5.2 (Nov/2014):
Novo conceito da posiÓÐo de parada de montagens equatoriais, permitindo que se estacione a montagem no polo celeste, sem com isso criar problemas ao reconhecer a posiÓÐo ao reiniciar.
Mais indicadores na tela inicial (barras de progresso, pierside).
Muitos bugs corrigidos.
V.5.3 (Dez/2014):
CompensaÓÐo de folga do mecanismo;
Derrotacionamento de campo para telescµpios altazimutais.
PosiÓ¾es definidas pelo usuÃrio para o focalizador.
V.5.4 (Jun/2017):
Driver ASCOM nativo, para o Telescµpio e Focalizador, nÐo mais precisando da emulaÓÐo LX200 nem de redirecionadores TCP/serial.
Implementados alguns novos comandos no protocolo, para suportar o novo driver ASCOM.
Acrescentado o "Indicador de foco instantãneo", que mostra a movimentaÓÐo do focalizador quando o SoundStepper està em segundo plano.
Acrescentado um timer para efetivamente tirar o foco dos controles da janela principal, permitindo ao usuario controlar o telescµpio com as setas do teclado.
Contato
Para participar do projeto, tirar dºvidas ou trocar experiõncias com outros usuÃrios do SoundStepper ao redor do mundo, ingresse no grupo de usuÃrios do SoundStepper:
Pela web, acessar https://groups.yahoo.com/neo/groups/soundstepper
Ou mandar um e-mail com "subscribe" no assunto para soundstepper-subscribe@yahoogroups.com
Ainda, pode enviar um e-mail diretamente a mim (mas entre no grupo por favor!):
![]()
Motores de passo e montagens
Motores de passo:
Se nÐo conhece o funcionamento dos motores de passo, veja tudo sobre eles nesta excelente pÃgina e seus links:
http://en.wikipedia.org/wiki/Stepper_motor
VersÐo em portuguõs, porÕm com menos conteºdo:
http://pt.wikipedia.org/wiki/Motor_de_passo
Sobre montagens equatoriais:
O que sÐo e quais os tipos de montagens equatoriais. Qual Õ a sua? (O SoundStepper pode ser utilizado com todas):
http://en.wikipedia.org/wiki/Equatorial_mount
Outra excelente pÃgina em portuguõs:
http://www.feiradeciencias.com.br/sala24/24_A22.asp
ReduÓÐo, resoluÓÐo, velocidade e bamboleio:
A reduÓÐo final da montagem, bem como as caracterÚsticas do motor, devem ser escolhidas de acordo com o compromisso entre o mÃximo "bamboleio" tÚpico (imprecisÐo do posicionamento do motor) permitido na imagem entre os passos do motor, e a velocidade mÚnima que se deseja para o movimento de "go-to" (e o torque, obviamente).
Os cÃlculos sÐo explicados na "calculadora de reduÓÐo e motorizaÓÐo de montagens equatoriais" abaixo, na qual vocõ pode testar os diversos valores de reduÓÐo e motorizaÓÐo possÚveis, e saber quais resultados obterÃ. Os valores padrÐo sÐo tÚpicos de montagens com "go-to" para astrofotografia.
OBS: AtravÕs do ajuste de linearidade da movimentaÓÐo do motor, o "bamboleio" Õ menor que 5% de passo. Este valor Õ utilizado na calculadora como o valor "W"=0,05.
Calculadora de motorizaÓÐo de montagens equatoriais:
ConstruÓÐo do hardware sugerido (drive analµgico / "controlador de corrente")
Primeiramente, compre e verifique seu dispositivo de Ãudio USB. Veja aqui como fazer isso!
Para drives "pulso/direÓÐo" veja como fazer o filtro aqui!
Diagrama genÕrico de controlador de corrente (drive analµgico), para uso com o SoundStepper (clique na imagem para a versÐo ampliada):

NûO MOSTRADO NO DIAGRAMA, MAS PRECISA ESTAR PRESENTE EM UM CIRCUITO REAL:
- Um capacitor de 100nF entre o +12V e o terra, prµximo ao TDA;
- 2 LEDs, dos pinos DIAG e CLIP para o +12V, em sÕrie com resistores de 1K;
- Conex¾es do +12V e terra ao op-amp CA324;
- Um capacitor de 1000uF, no mÚnimo, na saÚda da fonte de alimentaÓÐo;
- Um grande dissipador de calor para o TDA (para testes, um pedaÓo de alumÚnio 8x8cm, 1/8" de espessura, costuma funcionar bem).
OBS:
- Todos os capacitores de 100nF devem ser cerãmicos (nÐo-indutivo);
- Os resistores RL devem ser calculados para dar 1V com o motor na corrente nominal, e precisa dissipar o calor gerado;
- Os pinos PGND1, PGND2 e SGND do TDA devem ser ligados Á terra;
- Os pinos VP1, VP2 e MODE do TDA devem ser ligados ao +12V;
- è recomendado o uso de 8 diodos schottky, ligando as bobinas dos motores aos pontos +12V e terra (todos reversamente polarizados), para proteÓÐo do TDA;
- NÐo conecte ou desconecte cargas indutivas (bobinas dos motores) com o amplificador ligado, pode queimar o TDA;
- As conex¾es ao USB+ e USBGND podem ser feitas (com cuidado) dentro do dispositivo de Ãudio USB;
- Para os testes iniciais, use um amperÚmetro na fonte de alimentaÓÐo, para alertar para condiÓ¾es de curto-circuito ou oscilaÓ¾es ultrass¶nicas, que puxam muita energia e podem queimar o TDA;
- Nem o TDA nem o CA324 tem proteÓÐo contra polarizaÓÐo reversa;
- Os resistores de 22K e 82K conectados Ás entradas do CA324 precisam ser casados. As relaÓ¾es entre os valores efetivos dos resistores de 22K(vindo da entrada), 22K(vindo do RL) e 82K (vindo da saÚda) precisam ser o mais prµximas quanto possÚveis. Os resistores comerciais sÐo com 5% de tolerãncia, mas uma simples classificaÓÐo (usando o multÚmetro) em geral Õ suficiente para produzir um resultado de 1% de discrepãncia ou melhor. Isso precisa ser feito para os 4 conjuntos de resistores 22K + 22K + 82K. Cada conjunto Õ mostrado em uma cor diferente;
- Para os SJ588 e outros dispositivos de Ãudio com tensÐo de saÚda > 4V, os resistores de 22K da enttrada podem ser substituÚdos por outros de 47K, sempre casados com os de 22K(vindo do RL) e 82K (vindo da saÚda);
- Pode ser usada qualquer fonte de 12V (com boa isolaÓÐo, pois o terra da fonte serà ligado ao terra da USB). Uma fonte de 16V Õ vantajosa, porque os motores ficarÐo proporcionalmente mais fortes e mais rÃpidos. Existem muitas fontes antigas em sucata de notebook, com tens¾es de 15 ou 16V (os novos utilizam 18 ou 19V). O circuito amplificador TDA8566 aguenta trabalhar com atÕ 18V, mas nÐo Õ recomendado ficar assim tÐo no limite;
- O TDA8566 possui detetor de distorÓÐo na forma de onda, e esse precisa ser ligado a um LED. Quando o amplificador Õ solicitado a entregar uma tensÐo que excede a tensÐo de alimentaÓÐo, o LED acende, indicando que està sendo fornecida ao motor tensÐo mÃxima;
- O TDA8566 tambÕm tem proteÓÐo contra curto-circuito, mas como estes protµtipos tem resistores em sÕries com as bobinas do motor, se houver um curto-circuito o amplificador nÐo irà detectÃ-lo, e poderà queimar, ou aos resistores. Portanto, fusÚveis de aÓÐo rÃpida em sÕrie com as bobinas do motor sÐo benvindos.
Desenhos para construÓÐo em protoboard (somente em inglõs):
IMPORTANTE:
Antes de construir o controlador de corrente (drive analµgico), compre e verifique seu dispositivo de Ãudio USB. Veja aqui como fazer isso!
Alguns exemplos reais:
ConfiguraÓÐo dos dispositivos de Ãudio
Plugue o dispositivo de Ãudio USB na porta USB. O Windows irà reconhecer automaticamente o dispositivo, e vai mudar todo o Ãudio do PC para ele. Isso nÐo Õ desejado, o ideal Õ que o dispositivo de Ãudio padrÐo do PC seja a placa de som convencional, deixando o "AUDIO USB" somente para o Soundstepper.
Com os seguintes passos vocõ poderà ajustar corretamente o Windows para enviar os sinais do Soundstepper ao dispositivo de Ãudio USB sem interferõncias de e para outros dispositivos e softwares de Ãudio.
Se o dispositivo de Ãudio tiver algum driver proprietÃrio do fabricante, desses que permite ajustar "efeitos de Ãudio" (reverberaÓÐo, ambiente, equalizador, etc), desative tudo, pois estes "aprimoramentos" destroem a forma original da onda gerada pelo SoundStepper
Windows XP:
No painel de controle, "Sons e dispositivos de Ãudio", na aba "Ãudio" escolher o dispositivo padrÐo de gravaÓÐo e reproduÓÐo a outra saÚda de som. Outro ajuste que se deve fazer Õ sob a aba "volume", "ConfiguraÓ¾es de alto-falante", "avanÓadas...", escolher "fone de ouvido estÕreo". Se isso nÐo for feito, o driver altera a forma de onda, destruindo a linearidade do movimento do motor. Isto deve ser feito para cada dispositivo de Ãudio USB.
O prµximo passo Õ ajustar o volume. Na aba "volume", clicar em "avanÓado" (ou dando duplo-clique no Úcone do alto-falante no tray). Vai abrir o "Mixer" (controle de volume). Và no menu "opÓ¾es", "propriedades". Escolha como "dispositivo do Mixer", o primeiro dispositivo de Ãudio USB. Clique "OK", e coloque os controles "Volume" e "Som Wave" no mÃximo, desative o resto. Desta forma terà ajustado o volume do dispositivo ao mÃximo. Coloque tambÕm o controle de "balanÓo" no centro. FaÓa isso para cada um dos dispositivos de Ãudio USB. Depois disso, novamente menu "opÓ¾es", "propriedades", escolha como dispositivo do mixer sua placa de som convencional, OK, e ajuste o volume ao seu gosto.
Windows Vista ou 7:
No painel de controle ("modo de exibiÓÐo clÃssico) - som - aba "reproduÓÐo":
- Alterar o o dispositivo padrÐo para a saÚda "nÐo-USB" de som do computador: selecionar a saÚda padrÐo e clicar em "definir padrÐo".
Configurar corretamente cada saÚda de Ãudio USB: selecionar o dispositivo e clicar em "propriedades":
- Na aba "nÚveis", colocar o som a 100%;
- Na aba "melhorias", marcar "desabilitar todos os aprimoramentos";
- Na aba "avanÓado", marcar as duas opÓ¾es sobre o "modo exclusivo".
Se precisar usar o microfone do computador, terà que entrar na aba "gravaÓÐo" e reconfigurar o microfone nÐo-usb do computador como dispositivo padrÐo.
InstalaÓÐo e primeira utilizaÓÐo do software
Para instalar o software, apenas descompacte o ZIP para uma pasta qualquer.
O usuÃrio a executar o SoundStepper deve ter permissÐo de leitura e gravaÓÐo na pasta onde o programa se encontrar.
Para executar, duplo-clique no arquivo SoundStepper.exe.
Se for conveniente, pode ser criado um atalho no desktop ou menu iniciar, tendo o cuidado de especificar no local de inÚcio a pasta onde se localiza o executÃvel.
Primeira utilizaÓÐo do SoundStepper:
A primeira configuraÓÐo que deve ser feita Õ a dos dispositivos de Ãudio.
- Use um volume moderado e, por meio do utilitÃrio de teste (botÐo "testar"), faÓa o "teste de tensÐo contÚnua". MeÓa com um multÚmetro a tensÐo e corrente no motor. Repita o teste para os dois canais, de cada um dos motores.
- Corrija o volume se necessÃrio. O ideal Õ que a tensÐo e corrente sejam os valores nominis especificados para o seu motor.
- (opcional) Corrija a linearidade da movimentaÓÐo do motor, para aferiÓÐo pode ser usada a opÓÐo "teste de posicionamento estÃtico".
- Por meio da opÓÐo "teste de movimentaÓÐo", meÓa a velocidade mÃxima que o motor Õ capaz de desenvolver com torque suficiente para movimentar a montagem sem falhas.
- A linearidade tambÕm pode ser aferida por meio do "teste de movimentaÓÐo", seja usando baixa velocidade e acompanhando o movimento do eixo com a mÐo, seja usando alta velocidade e observando a vibraÓÐo.
- Coloque o motor em baixa velocidade (1Hz por exemplo) e deixe por uma hora, para aferir a eficÃcia dos dissipadores, e o nÐo-superaquecimento de nenhum componente.
- No teste de movimentaÓÐo, o comportamento normal Õ o motor girar bem firme e com o led "clip" apagado atÕ uma determinada velocidade. AtÕ aÚ o motor està girando com torque mÃximo. A partir desta velocidade o LED "clip" acende, indicando que uma tensÐo maior que 12V na entrada seria necessÃria para manter o mesmo torque. Isso acontece por causa da forÓa contra-eletromotriz induzida pela rotaÓÐo do motor (muitas vezes maior que o efeito da indutãncia), o circuito teria que fornecer uma tensÐo muito maior para vencer esta tensÐo contrÃria e manter a corrente nominal. Por isso, aumentando a velocidade alÕm deste valor, provocamos diminuiÓÐo do torque. O uso de fontes de alimentaÓÐo de 16V, ao invÕs de 12V, proporciona maiores velocidades, mas acompanhadas de maior dissipaÓÐo de calor nos amplificadores.
Apµs corretamente configurados todos os dispositivos de Ãudio, configure as demais opÓ¾es para que o SoundStepper saiba com que tipo de montagem està lidando.
Tenha certeza que compreende o significado de todas elas! Uma primeira ajuda Õ a "dica" que aparece ao parar o ponteiro do mouse sobre a opÓÐo. Caso nÐo seja suficiente, para tirar dºvidas ou trocar experiõncias com outros usuÃrios do SoundStepper ao redor do mundo, ingresse no grupo de usuÃrios do SoundStepper:
Pela web, acessar http://tech.groups.yahoo.com/group/soundstepper/
Ou mandar um e-mail com "subscribe" no assunto para soundstepper-subscribe@yahoogroups.com
No grupo, vocõ pode solicitar esclarecimentos sobre quaisquer dºvidas. Assim que as perguntas forem sendo feitas, eu posso ter uma idÕia das principais dºvidas e incluÚ-las nas dicas ou nesta documentaÓÐo.
Salve as opÓ¾es e divirta-se!
IntegraÓÐo com outros softwares
IntegraÓÐo via driver ASCOM nativo (RECOMENDADO):
Baixe e instale a plataforma ASCOM, bem como os upgrades disponÚveis.
Em seguida instale os drivers ASCOM do SoundStepper, a partir dos arquivos de instalaÓÐo contidos no mesmo ZIP do SoundStepper:
Ao conectar pela primeira vez, escolha o driver ASCOM do SoundStepper e faÓa as configuraÓ¾es solicitadas pelo driver.
IntegraÓÐo via emulaÓÐo LX200:
O SoundStepper implementa todos os comandos relevantes do protocolo LX200, sendo totalmente compatÚvel com um Autostar #497, inclusive se identificando pela interface como tal. A interface utilizada pelo SoundStepper Õ a rede local, ele escuta na porta TCP 24474 (vocõ pode acessar via TELNET: no prompt de comando, "telnet localhost 24474").
Para utilizar com softwares compatÚveis com LX200 (nÐo-ASCOM), Õ necessÃria a instalaÓÐo de um emulador de porta serial, que cria uma porta serial virtual no computador, e redireciona esta porta serial para a porta TCP do SoundStepper:
Trabalhando com PEC/NPEC (somente para montagens equatoriais)
Erros periµdicos:
A maioria das montagens possui, em diferentes graus, algum tipo de problema mecãnico que produz um erro que se repete da mesma maneira todas as vezes que um determinado eixo ou engrenagem intermediÃria completa 360 graus (comumente o parafuso sem-fim), por isso "periµdico".
Erros nÐo periµdicos:
Outros problemas, nÐo diretamente relacionados ao posicionamento de um ºnico eixo, poderiam ser genericamente chamados de "nÐo-periµdicos". Mas hà que se fazer uma distinÓÐo entre os erros nÐo periµdicos aleatµrios que sÐo produzidos por problemas diversos que nÐo se repetem segundo nenhum padrÐo, e os erros repetitÚveis porÕm nÐo-periµdicos.
Em montagens "manuais", cujos eixos nÐo completam 180 graus, mas apenas sÐo capazes de realizar o acompanhamento ou guiagem por um menor ãngulo, costumamos notar algum tipo de erro que normalmente se deve Á geometria da montagem, ou Ás imperfeiÓ¾es de algum fuso. Este tipo de erro Õ particularmente percebido quando sÐo utilizadas montagens movidas a "fuso-braÓo" (como a "Astrotrac"), ou mesmo "fuso-setor de cÚrculo", embora em menor grau.
Os erros geomÕtricos derivados de um acoplamento "fuso-braÓo", bem como aqueles devidos Ás imperfeiÓ¾es ao longo do fuso, que nÐo se repetem a cada volta, mas se repetem a cada "passada", sÐo "nÐo-periµdicos" e repetitÚveis. è este tipo de erro que o SoundStepper Õ capaz de compensar.
Aos erros nÐo-periµdicos aleatµrios vamos chamar simplesmente "erros aleatµrios". Daqui pra frente os "erros nÐo periµdicos" significam "erros nÐo periµdicos repetitÚveis em montagens manuais".
PEC/NPEC:
O SoundStepper pode fazer no eixo de R.A. correÓÐo de erros periµdicos ("PEC = Periodic Error Correction") bem como correÓÐo de erros nÐo periµdicos ("NPEC"), o que significa que Õ possÚvel memorizar no sistema a velocidade correta para cada ponto do eixo motriz ou do fuso, e durante o acompanhamento o telescµpio serà capaz de reproduzir esta sequõncia de velocidades, compensando os problemas mecãnicos.
Esta memorizaÓÐo, tambÕm chamada de "treinamento", consiste em fazer o acompanhamento preciso de alguma estrela, realizando todas as correÓ¾es necessÃrias para mantõ-la sempre estÃtica na tela da webcam (ou ocular reticulada), enquanto o SoundStepper vai armazenando em "Arquivos de PEC" o registro das correÓ¾es. Estes registros podem ser utilizados posteriormente para reproduÓÐo das correÓ¾es efetuadas.
Embora NPEC seja algo mais raro, comercialmente disponÚvel apenas nas montagens "Astrotrac", hà bastante literatura na web disponÚvel sobre PEC: procure no Google "periodic error correction PEC"
Como configurar PEC/NPEC no SoundStepper:
1- Identifique sua fonte primÃria de erros, se Õ periµdica, ou se Õ nÐo periµdica e repetitÚvel. Se os erros forem periµdicos, identifique o eixo causador dos erros.
2- Marque o "PEC-Index": Para podermos armazenar as correÓ¾es feitas, e posteriormente reproduzÚ-las, precisamos de um referencial. Este referencial serà o ponto chamado de "PEC-Index", que Õ uma marca a ser feita no eixo causador do erro (para NPEC, o inÚcio do curso do motor de R.A.).
3- Calcule a "duraÓÐo do ciclo de PEC/NPEC":
4- Configure estes valores no SoundStepper:
5- Configure todas as demais opÓ¾es antes de prosseguir. Como nÐo foi feita nenhuma guiagem ainda, nÐo hà "Arquivo de PEC a reproduzir", muito menos "mºltiplos arquivos de PEC" a consolidar.
6- Instale e configure o driver ASCOM caso o software de guiagem trabalhe com este tipo de conectividade.
7- Inicie o acompanhamento, bem como o software de guiagem. Configure "treine" o software de guiagem caso necessÃrio, e inicie a guiagem.
8- O SoundStepper irà armazenar as correÓ¾es efetuadas pelo software de guiagem em arquivos de PEC: "SStepper_Guiding_DATA_HORA.PEC". Deixe que o SoundStepper grave vÃrios destes arquivos, quanto mais melhor, pois teremos como separar melhor os erros aleatµrios dos erros repetitÚveis. Se possÚvel faÓa gravaÓ¾es em vÃrias Ãreas do cÕu, e com a montagem de ambos os lados do pier.
9- Retorne a montagem para a posiÓÐo inicial, e ao "PEC-Index", feche e reinicie o SoundStepper. Quando for perguntado, delete as informaÓ¾es sobre ºltima posiÓÐo salva, e clique em "Consolidar mºltiplos arquivos de PEC".
10- Selecione todos os arquivos salvos nos passos anteriores (use o recurso de seleÓÐo mºltipla, shift-click ou control-click), abrir.
11- Clique em "Arquivo de PEC a reproduzir", e escolha o arquivo que foi salvo durante o passo 10. Desmarque a caixa "Gera novo arquivo de PEC a cada guiagem bem-sucedida". Salve as configuraÓ¾es e teste o funcionamento.
12- Lembre-se de que as configuraÓ¾es de PEC sÐo especÚficas para uma determinada montagem, e em um determinado hemisfÕrio. Se mudar de montagem ou de hemisfÕrio, elas devem ser refeitas, a partir do inÚcio.
Hospedagem do projeto:.net